Rapiro Robot
This chapter introduced how to build a robot that controlled by HS face detector.
Hardware requirement:
- Horned Sungem Device
- Raspberry Pi 3b
- Rapiro Robot
- 12V to 5V DC-DC module (Optional)
- Cooling fan (Optional)
Workflow
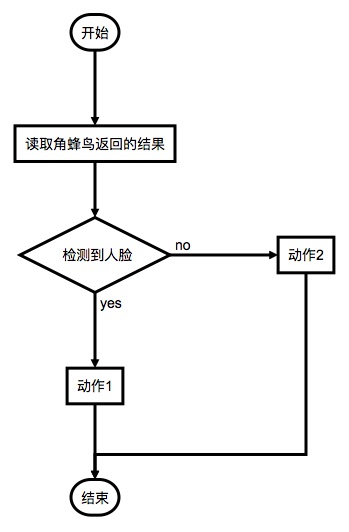
The built-in model Mobilenet-SSD face detector is used in this DIY demo. The logic is illustrated as below:
Implementation
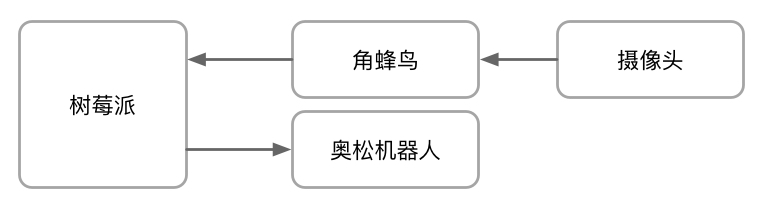
Firstly assemble and power the Rapiro robot, then use robot to supply the power to a Raspeberry Pi. The signal is sent through USB port.
Please note that due to the low stability of Raspberry Pi USB power transfer, it might be sometimes insufficient to power the HS device. However, it’s possible to use an extra cable to power the HS.
To make to robot looks good, we put all things into his head:

The controlling code for rapiro robot:
class RapiroProcessor(Thread):
class Flags:
face = None
face_frame_cnt = 0
head_angle = 90
arm_raised = False
light_on = False
light_need_change = False
def __init__(self, connection):
Thread.__init__(self)
self.daemon = True
self.rapiro = Rapiro(connection)
self.flags = RapiroProcessor.Flags()
def reset(self):
self.rapiro.execute(GO_TO_INITIAL_POSITION)
time.sleep(3)
def run(self):
self.reset()
try:
while True:
time.sleep(0.1)
has_face = self.flags.face is not None
frame_cnt = self.flags.face_frame_cnt
comm = ""
if has_face: # Head pose
x1 = self.flags.face[2]
x2 = self.flags.face[4]
x_mid = (x1 + x2) / 2
if x_mid > 0.6 or x_mid / 2 < 0.4:
angle = self.flags.head_angle - int((x_mid - 0.5) / 0.1)
else:
angle = self.flags.head_angle
angle = 180 if angle > 180 else angle
angle = 0 if angle < 0 else angle
self.flags.head_angle = angle
eye = (246, 124, 1)
frame_cnt += 1
else:
eye = (2, 220, 255)
frame_cnt -= 1
self.flags.light_need_change = (not has_face if self.flags.light_on else has_face)
self.flags.light_on = has_face
if frame_cnt > 5: # Raise hand
self.flags.face_frame_cnt = 5
if not self.flags.arm_raised:
comm += r_shoulder_yz(90, 1)
self.flags.arm_raised = True
elif frame_cnt < -5: # Put hand down
self.flags.face_frame_cnt = -5
if self.flags.arm_raised:
comm += r_shoulder_yz(0, 1)
self.flags.arm_raised = False
else:
self.flags.face_frame_cnt = frame_cnt
if self.flags.light_need_change: # Change eyes colour
comm += eye_color(eye[0], eye[1], eye[2], 1)
comm += head_yaw(self.flags.head_angle, 1)
self.rapiro.execute(comm)
finally:
self.reset()
the python code for HS:
#!/usr/bin/env python3
# coding=utf-8
import sys
sys.path.append("../../SungemSDK-Python")
import hsapi as hs
import rapiro
import video
def process(ret):
img = ret[0]
face = []
img_w = img.shape[1]
img_h = img.shape[0]
for box in ret[1]:
if (box[4] - box[2] > img_w * 0.8) \
and (box[5] - box[3] > img_h * 0.8):
continue
box[2] /= img_w
box[4] /= img_w
box[3] /= img_h
box[5] /= img_h
face.append(box)
return face
if __name__ == '__main__':
t_rapiro = rapiro.RapiroProcessor("/dev/ttyUSB0") # 控制线程
t_video = video.VideoProcessor(("192.168.50.202", 10600)) # 视频线程
try:
net = hs.FaceDetector(zoom=True, verbose=0, threshSSD=0.55)
t_rapiro.start()
t_video.start()
while True:
result = net.run()
image = net.plot(result)
faces = process(result)
t_rapiro.flags.face = faces[0] if len(faces) > 0 else None
if t_video.has_client():
t_video.input_queue.put(image)
finally:
t_rapiro.reset()
Outcome
When face is detected, the robot will turn his head to the face, raises right hand and his eyes will turn yellow. If no face detected, he will return to the default status.